本文将介绍四种感知机算法,包含批量感知机、pocket感知机、在线感知机以及核化感知机。
感知机算法:每发现一个错误点,就对它就行纠正。
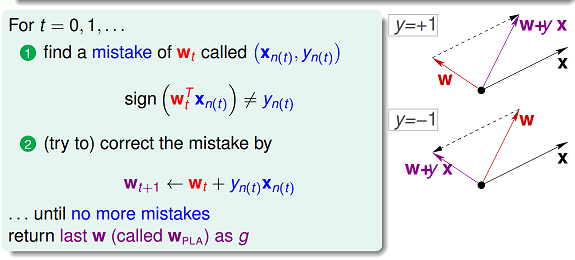
PLA
损失函数为: \[ L(w, b) = -\sum_{x_i\in{M}}y_i(wx_i+b) \] 其中M为误分点集合。
批量感知机
批量感知机求解的是损失函数全局最优梯度。
损失函数的梯度: \[ \nabla_wL(w,b)=-\sum_{x_i\in{M}}y_ix_i \\ \nabla_bL(w,b)=-\sum_{x_i\in{M}}y_i \] 每轮迭代需要用到所有样本。
算法如下:
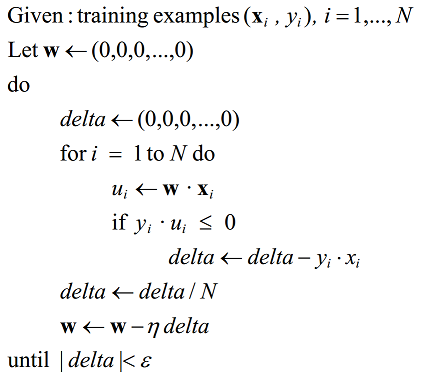
BPLA
pocket感知机
口袋算法基于贪心的思想。随机梯度下降,求解的是单个误分类点的梯度,用来近似全局最优梯度。
更新为:
随机选取一个误分类点\((x_i,y_i)\) \[ w = w+\eta y_ix_i \\ b = b+\eta y_i \] \(\eta\)为更新步长,又称学习率。
算法如下:
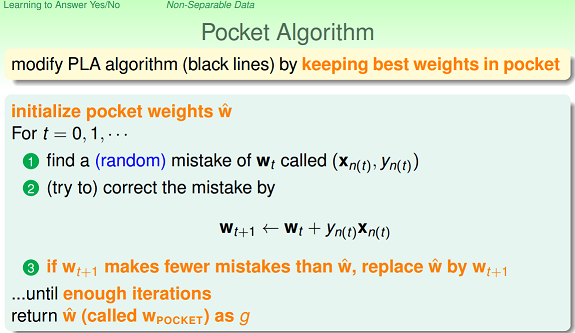
PPLA
在线感知机
在线算法,来一个算一个,类似随机梯度下降求解。
算法如下:
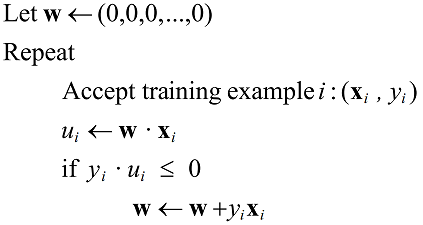
OPLA
核化感知机
考虑最终的\(w,b\)是修改n次后的增量,也就是: \[ w=\sum_{i=1}^{N}\alpha_iy_ix_i \\ b=\sum_{i=1}^{N}\alpha_iy_i \\ \] 其中\(\alpha_i=n_i\eta\)。
最终的\(f(x)\)如下: \[ f(x)=\sum_{i=1}^{N}\alpha_iy_ix_i\cdot x+b \] 公式中存在\(x_i\cdot x\)项,就可以采用核化理论,这就是核化感知机算法。
至此, 四种感知机算法解释完毕。
